Pythonを使ったAPx500ソフトウエア制御方法とは?
Pythonを使ったAPx500制御
スクリプトでAPx500ソフトウエアを制御する際、APx500 APIを参照して、コマンドはランタイムでコンパイルしなければなりません。APIのライブラリーは.NET assemblies (dll files)に入っており、.NETランタイム環境上でしか実行できないので、標準のPython言語は使えません。カスタマイズしたIronPythonまたは、Pythonnetを追加したパッケージを活用することで、.NETライブラリーに対応致します。
Pythonnetは標準のPythonまたは最新のバージョンを使っている環境に適しております。 2020年12月現在、IronPythonはPython2.7をベースにしており、PythonnetはVersion3.8までの複数のバージョンに対応しています。
対して、APx500ソフトウエアはAPx500アプリケーションに対応したOSでのみ利用できることから、次のステップを行う必要がございます。OSの対応に関しては、以下のリンクを参照願います。
www.ap.com/technical-library/ap-software-windows-version-compatibility
ステップ1:Pythonのインストール
インストールする前に、Pythonnet GitHub Repositoryを使って、対応するPythinnetのバージョンを確認してください。github.com/pythonnet/pythonnet
2020年12月現在、対応しているバージョンは、2.7, 3.5, 3.6, 3.7, 3.8です。(図1参照)

確認後、www.Python.org.からインストールしてください。
ステップ2:Windows PathにPythonを追加します。
Pythonをインストール後、WindowsのコマンドプロンプトからPythonコマンドが使えるようにWindows Pathの設定を変更する必要がございます。Windows10の場合、
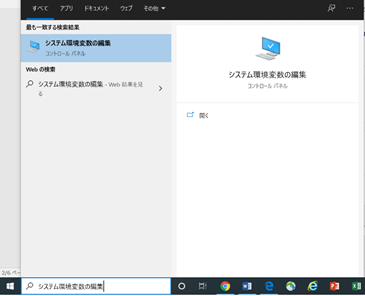
1.タスクバーでシステム環境変数の編集で検索すると、システムのプロパティが表示されます。詳細設定の環境変数をクリックします。

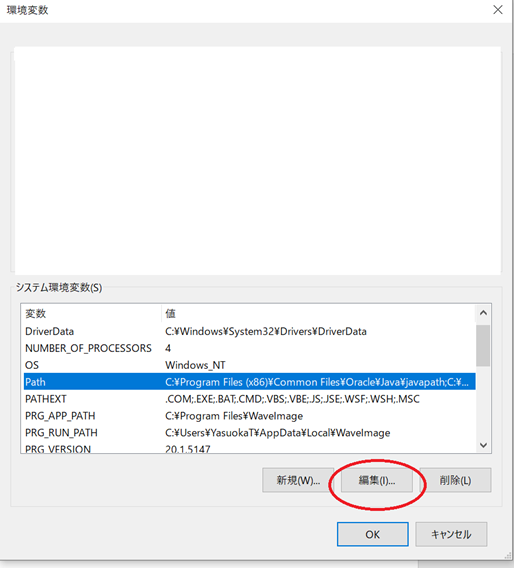
2.プロパティのシステム環境変数のPATHを見つけ、編集をクリックします。
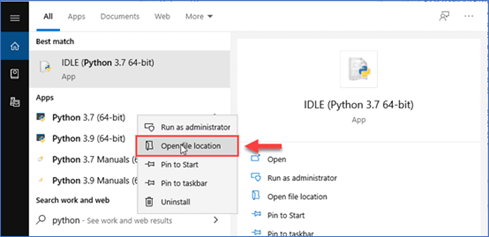
3.PythonをインストールしたディレクトリをPathに追加致します。WindowsのタスクバーからPythonを検索し、右クリックで利用したいVersionを選択し、「ファイルを開く」を選択します。
4.Pythonのショートカットを選択し、ショートカットツールの「開く」を選択します。
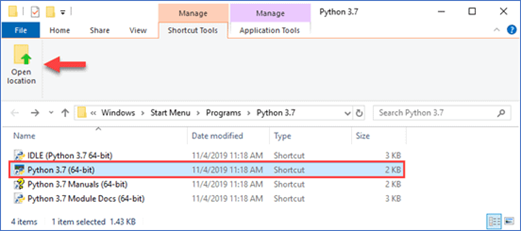
5.エクスプローラーのアドレスバーから全ファイルのパスをコピーします。
6. システム環境変数の編集に戻って新規を開きます。
7. Pythonのパスを貼り付けて新しいパスを加えます。
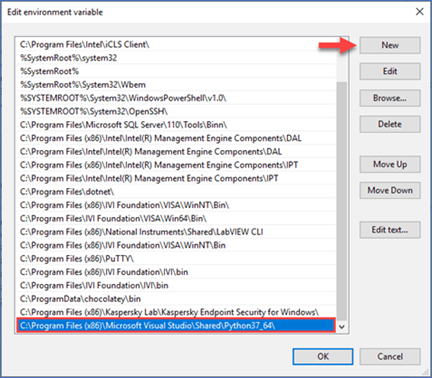
8.新規をクリックし、コピーしたパスを貼り付けて、最後に\Scripts\を付け加えます。
9.OKをクリックし、システム環境変数が変更したことを確認します。
Pythonがパスが追加されているかを確認するには、Windowsのコマンドプロンプトを開き、”python-version”をタイプします。コマンドプロンプトはパスについかされたPythonのVersionを表示します。 (例、 Python 3.7.4).
ステップ3 パッケージマネージャーを使ってPythonnetをインストールする
PythonnetパッケージはPythonのパッケージマネージャーのpipを使ってインストールします。PipはPythonの新しいVersionに自動的にインストールされています。
Pipを使ってインストールするには、
- Windowsのコマンドプロンプトを開きます。
- pip install pythonnetをタイプします。
これでAPx500ソフトウエアを制御できる環境が整いました。
以下のリンクからPythonのスクリプトのデモが例示されています。例えば、APx500 APIを使ってソフトウェアの初期化やプロジェクトファイルのロード方法、シーケンスを走らせる、シーケンスを終えた後のデータ収集等の例になります。
www.ap.com/download/apx500-pythonnet-example
ItonPythonを使ってAPI開発を行う手順は以下のリンクを参照願います。
www.ap.com/technical-library/controlling-apx500-with-python
詳細は以下のサイトを参照願います。
www.ap.com/blog/controlling-apx500-software-using-python